本系统是基于免维护地面定位技术的车载自动过分相控制系统。机车通过感应地面定位信号确定机车与分相点的相对位置,地面定位和机车感应信号分别采用斜对称埋设和备份接收,以保证自动过分相的安全和可靠。  图5 地面感应器的埋设方式 如图5所示,预先根据要求在每个分相区前后分别埋设两个地面感应器。 以机车Ⅰ端向前运行为例,安装在机车Ⅰ端左侧的感应接收器设为1号,右侧设为2号,Ⅱ端左侧的感应接收器设为3号,右侧设为4号(如图6所示)。 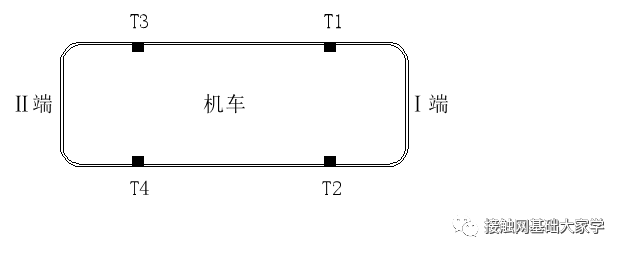 图6 地面感应接收器在机车上安装位置示意图 机车按图5箭头方向运行在通过地面磁性感应器时,T2号或T4号感应接收器接收到车位定位信号(G1感应器信号),控制装置记录机车即时速度V,控制装置根据速度计算出延时时间t,t=170m/v-t0,t0时间包括司机指令回零时间、各辅助机组断开时间、劈相机断开时间和主断路器断开时间。同时,司机台的过分相指示灯亮,表示控制装置已接收到分相点前车位定位信号,控制装置开始进行自动过分相控制。经过延时t后,控制装置分别执行司机指令回零,通风机、压缩机和劈相机断开动作,最后执行主断路器断开动作。机车无负荷通过分相区间后,如控制装置的任何一个感应接收器接收到车位定位信号,表明机车已通过分相区间,控制装置分别执行主断路器闭合,启动劈相机、压缩机和通风机,最后 恢复司机指令。机车恢复原有状态。司机台的过分相指示灯熄灭,表明控制装置已完成自动过分相控制。 在某些特殊情况下,如:地面感应器丢失、感应接收器故障或信号线断等原因。控制装置的T2号或T4号感应接收器接收不到车位定位信号。控制装置的T1号或T3号感应接收器接收到车位定位信号(G2感应器信号),司机台的指示信号灯亮,表示控制装置已接收到车位定位信号,控制装置立即执行司机指令回零,通风机、压缩机、劈相机和主断路器断开动作。 2.1感应接收器 自动过分相的关键技术是定位,定位是否准确是系统准确性和可靠性的关键。感应接收器安装在机车的转向架上,采用密封防水、防震设计处理,保证系统的可靠运行。 安装在机车转向架上的感应接收器通过地面感应器时,在感应接收器上感应一个幅值和宽度与机车运行速度相对应的信号。 感应接收器安装于机车下部转向架的两侧,共四个,前后相互备份。 感应接收器基于电磁感应原理,感应接收器线圈与地面感应器的磁场相结合,完成系统的定位识别。具有识别准确度高、响应时间短、抗干扰能力强、无故障运行时间长等优点。识别时间约为7ms,试验的最高速度达302km/h。 车载自动过分相装置的感应接收器安装要求:距钢轨中心300mm±10mm,距钢轨踏面110mm+10mm)。 2.2 地面感应器 地面感应器是嵌入到轨枕里的永久磁铁,具有耐高温、耐腐蚀、不会损坏等特点,适合安装在室外。 2.3 控制系统 控制系统是由系统信号处理单元以及控制单元组成。系统信号处理单元具有采集感应接收器接收的定位信号、机车运行方向、处理相应的信息、发出相关的信息指令、自诊断故障信息、输出显示信息等功能。系统控制单元则由控制装置的执行电路来实现,主要功能是根据由系统信号处理单元输出的信号,控制牵引电流下降、通风机、压缩机和劈相机断开动作,最后执行主断路器断开动作。通过分相区后,根据接收到的定位信号,控制闭合主断路器和控制牵引电流平稳上升。 在前进方向右侧的感应接收器分别接收到预告感应器信号和反向强迫感应器信号,以及前进方向左侧感应接收器分别接收到强迫感应器信号和反向预告感应器信号,自动过分相控制装置则屏蔽接收信号16秒后才开始接收感应信号, 否则将屏蔽感应接收信号2分钟后开始感应接收信号。  自动过分相控制装置在通电、屏蔽接收信号结束或通过分相区后进行一次自检。 自检不通过则速度/故障指示灯发出1Hz的故障信号(红色和绿黄色指示灯交替亮),装置停止使用,采用手动控制过分相。 (文章来源:广铁集团公司科研所) |
手机版|学习积分|美路科技培训学习平台 备案号:鲁ICP备18021794号
GMT+8, 2024-12-21 19:56 , Processed in 0.096993 second(s), 16 queries .






